Documentation
The Hand class reports the physical characteristics of a detected hand. More...
Inherits com.leapmotion.leap.Interface.
Public Member Functions | |
| Vector | direction () |
| The direction from the palm position toward the fingers. |
|
| boolean | equals (Hand arg0) |
| Compare Hand object equality. |
|
| Finger | finger (int id) |
| The Finger object with the specified ID attached to this hand. |
|
| FingerList | fingers () |
| The list of Finger objects detected in this frame that are attached to this hand, given in arbitrary order. |
|
| Frame | frame () |
| The Frame associated with this Hand. |
|
| Hand () | |
| Constructs a Hand object. |
|
| int | id () |
| A unique ID assigned to this Hand object, whose value remains the same across consecutive frames while the tracked hand remains visible. |
|
| boolean | isValid () |
| Reports whether this is a valid Hand object. |
|
| Vector | palmNormal () |
| The normal vector to the palm. |
|
| Vector | palmPosition () |
| The center position of the palm in millimeters from the Leap Motion Controller origin. |
|
| Vector | palmVelocity () |
| The rate of change of the palm position in millimeters/second. |
|
| Pointable | pointable (int id) |
| The Pointable object with the specified ID associated with this hand. |
|
| PointableList | pointables () |
| The list of Pointable objects (fingers and tools) detected in this frame that are associated with this hand, given in arbitrary order. |
|
| float | rotationAngle (Frame sinceFrame) |
| The angle of rotation around the rotation axis derived from the change in orientation of this hand, and any associated fingers and tools, between the current frame and the specified frame. |
|
| float | rotationAngle (Frame sinceFrame, Vector axis) |
| The angle of rotation around the specified axis derived from the change in orientation of this hand, and any associated fingers and tools, between the current frame and the specified frame. |
|
| Vector | rotationAxis (Frame sinceFrame) |
| The axis of rotation derived from the change in orientation of this hand, and any associated fingers and tools, between the current frame and the specified frame. |
|
| Matrix | rotationMatrix (Frame sinceFrame) |
| The transform matrix expressing the rotation derived from the change in orientation of this hand, and any associated fingers and tools, between the current frame and the specified frame. |
|
| float | rotationProbability (Frame sinceFrame) |
| The estimated probability that the hand motion between the current frame and the specified frame is intended to be a rotating motion. |
|
| float | scaleFactor (Frame sinceFrame) |
| The scale factor derived from this hand's motion between the current frame and the specified frame. |
|
| float | scaleProbability (Frame sinceFrame) |
| The estimated probability that the hand motion between the current frame and the specified frame is intended to be a scaling motion. |
|
| Vector | sphereCenter () |
| The center of a sphere fit to the curvature of this hand. |
|
| float | sphereRadius () |
| The radius of a sphere fit to the curvature of this hand. |
|
| Vector | stabilizedPalmPosition () |
| The stabilized palm position of this Hand. |
|
| float | timeVisible () |
| The duration of time this Hand has been visible to the Leap Motion Controller. |
|
| Tool | tool (int id) |
| The Tool object with the specified ID held by this hand. |
|
| ToolList | tools () |
| The list of Tool objects detected in this frame that are held by this hand, given in arbitrary order. |
|
| String | toString () |
| A string containing a brief, human readable description of the Hand object. |
|
| Vector | translation (Frame sinceFrame) |
| The change of position of this hand between the current frame and the specified frame. |
|
| float | translationProbability (Frame sinceFrame) |
| The estimated probability that the hand motion between the current frame and the specified frame is intended to be a translating motion. |
|
Static Public Member Functions | |
| static Hand | invalid () |
| Returns an invalid Hand object. |
|
Detailed Description
The Hand class reports the physical characteristics of a detected hand.
Hand tracking data includes a palm position and velocity; vectors for the palm normal and direction to the fingers; properties of a sphere fit to the hand; and lists of the attached fingers and tools.
Get Hand objects from a Frame object:
Note that Hand objects can be invalid, which means that they do not contain valid tracking data and do not correspond to a physical entity. Invalid Hand objects can be the result of asking for a Hand object using an ID from an earlier frame when no Hand objects with that ID exist in the current frame. A Hand object created from the Hand constructor is also invalid. Test for validity with the Hand::isValid() function.
- Since
- 1.0
Constructor & Destructor Documentation
| com.leapmotion.leap.Hand.Hand | ( | ) |
Member Function Documentation
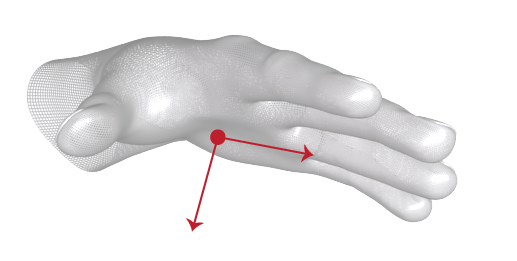
| Vector com.leapmotion.leap.Hand.direction | ( | ) |
The direction from the palm position toward the fingers.
The direction is expressed as a unit vector pointing in the same direction as the directed line from the palm position to the fingers.
You can use the palm direction vector to compute the pitch and yaw angles of the palm with respect to the horizontal plane:
- Returns
- The Vector pointing from the palm position toward the fingers.
- Since
- 1.0
| boolean com.leapmotion.leap.Hand.equals | ( | Hand | arg0 | ) |
| Finger com.leapmotion.leap.Hand.finger | ( | int | id | ) |
The Finger object with the specified ID attached to this hand.
Use the Hand::finger() function to retrieve a Finger object attached to this hand using an ID value obtained from a previous frame. This function always returns a Finger object, but if no finger with the specified ID is present, an invalid Finger object is returned.
Note that ID values persist across frames, but only until tracking of a particular object is lost. If tracking of a finger is lost and subsequently regained, the new Finger object representing that finger may have a different ID than that representing the finger in an earlier frame.
- Parameters
-
id The ID value of a Finger object from a previous frame.
- Returns
- The Finger object with the matching ID if one exists for this hand in this frame; otherwise, an invalid Finger object is returned.
- Since
- 1.0
| FingerList com.leapmotion.leap.Hand.fingers | ( | ) |
The list of Finger objects detected in this frame that are attached to this hand, given in arbitrary order.
The list can be empty if no fingers attached to this hand are detected.
- Returns
- The FingerList containing all Finger objects attached to this hand.
- Since
- 1.0
| Frame com.leapmotion.leap.Hand.frame | ( | ) |
| int com.leapmotion.leap.Hand.id | ( | ) |
A unique ID assigned to this Hand object, whose value remains the same across consecutive frames while the tracked hand remains visible.
If tracking is lost (for example, when a hand is occluded by another hand or when it is withdrawn from or reaches the edge of the Leap Motion Controller field of view), the Leap Motion software may assign a new ID when it detects the hand in a future frame.
Use the ID value with the Frame::hand() function to find this Hand object in future frames:
- Returns
- The ID of this hand.
- Since
- 1.0
|
static |
Returns an invalid Hand object.
You can use the instance returned by this function in comparisons testing whether a given Hand instance is valid or invalid. (You can also use the Hand::isValid() function.)
- Returns
- The invalid Hand instance.
- Since
- 1.0
| boolean com.leapmotion.leap.Hand.isValid | ( | ) |
| Vector com.leapmotion.leap.Hand.palmNormal | ( | ) |
The normal vector to the palm.
If your hand is flat, this vector will point downward, or "out" of the front surface of your palm.
The direction is expressed as a unit vector pointing in the same direction as the palm normal (that is, a vector orthogonal to the palm).
You can use the palm normal vector to compute the roll angle of the palm with respect to the horizontal plane:
- Returns
- The Vector normal to the plane formed by the palm.
- Since
- 1.0
| Vector com.leapmotion.leap.Hand.palmPosition | ( | ) |
The center position of the palm in millimeters from the Leap Motion Controller origin.
- Returns
- The Vector representing the coordinates of the palm position.
- Since
- 1.0
| Vector com.leapmotion.leap.Hand.palmVelocity | ( | ) |
The rate of change of the palm position in millimeters/second.
- Returns
- The Vector representing the coordinates of the palm velocity.
- Since
- 1.0
| Pointable com.leapmotion.leap.Hand.pointable | ( | int | id | ) |
The Pointable object with the specified ID associated with this hand.
Use the Hand::pointable() function to retrieve a Pointable object associated with this hand using an ID value obtained from a previous frame. This function always returns a Pointable object, but if no finger or tool with the specified ID is present, an invalid Pointable object is returned.
Note that the ID values assigned to objects persist across frames, but only until tracking of that object is lost. If tracking of a finger or tool is lost and subsequently regained, the new Pointable object representing that finger or tool may have a different ID than that representing the finger or tool in an earlier frame.
- Parameters
-
id The ID value of a Pointable object from a previous frame.
- Returns
- The Pointable object with the matching ID if one exists for this hand in this frame; otherwise, an invalid Pointable object is returned.
- Since
- 1.0
| PointableList com.leapmotion.leap.Hand.pointables | ( | ) |
The list of Pointable objects (fingers and tools) detected in this frame that are associated with this hand, given in arbitrary order.
The list can be empty if no fingers or tools associated with this hand are detected.
Use the Pointable::isFinger() function to determine whether or not an item in the list represents a finger. Use the Pointable::isTool() function to determine whether or not an item in the list represents a tool. You can also get only fingers using the Hand::fingers() function or only tools using the Hand::tools() function.
- Returns
- The PointableList containing all Pointable objects associated with this hand.
- Since
- 1.0
| float com.leapmotion.leap.Hand.rotationAngle | ( | Frame | sinceFrame | ) |
The angle of rotation around the rotation axis derived from the change in orientation of this hand, and any associated fingers and tools, between the current frame and the specified frame.
The returned angle is expressed in radians measured clockwise around the rotation axis (using the right-hand rule) between the start and end frames. The value is always between 0 and pi radians (0 and 180 degrees).
If a corresponding Hand object is not found in sinceFrame, or if either this frame or sinceFrame are invalid Frame objects, then the angle of rotation is zero.
- Parameters
-
sinceFrame The starting frame for computing the relative rotation.
- Returns
- A positive value representing the heuristically determined rotational change of the hand between the current frame and that specified in the sinceFrame parameter.
- Since
- 1.0
The angle of rotation around the specified axis derived from the change in orientation of this hand, and any associated fingers and tools, between the current frame and the specified frame.
The returned angle is expressed in radians measured clockwise around the rotation axis (using the right-hand rule) between the start and end frames. The value is always between -pi and pi radians (-180 and 180 degrees).
If a corresponding Hand object is not found in sinceFrame, or if either this frame or sinceFrame are invalid Frame objects, then the angle of rotation is zero.
- Parameters
-
sinceFrame The starting frame for computing the relative rotation. axis The axis to measure rotation around.
- Returns
- A value representing the heuristically determined rotational change of the hand between the current frame and that specified in the sinceFrame parameter around the specified axis.
- Since
- 1.0
The axis of rotation derived from the change in orientation of this hand, and any associated fingers and tools, between the current frame and the specified frame.
The returned direction vector is normalized.
If a corresponding Hand object is not found in sinceFrame, or if either this frame or sinceFrame are invalid Frame objects, then this method returns a zero vector.
- Parameters
-
sinceFrame The starting frame for computing the relative rotation.
- Returns
- A normalized direction Vector representing the heuristically determined axis of rotational change of the hand between the current frame and that specified in the sinceFrame parameter.
- Since
- 1.0
The transform matrix expressing the rotation derived from the change in orientation of this hand, and any associated fingers and tools, between the current frame and the specified frame.
If a corresponding Hand object is not found in sinceFrame, or if either this frame or sinceFrame are invalid Frame objects, then this method returns an identity matrix.
- Parameters
-
sinceFrame The starting frame for computing the relative rotation.
- Returns
- A transformation Matrix representing the heuristically determined rotational change of the hand between the current frame and that specified in the sinceFrame parameter.
- Since
- 1.0
| float com.leapmotion.leap.Hand.rotationProbability | ( | Frame | sinceFrame | ) |
The estimated probability that the hand motion between the current frame and the specified frame is intended to be a rotating motion.
If a corresponding Hand object is not found in sinceFrame, or if either this frame or sinceFrame are invalid Frame objects, then this method returns zero.
- Parameters
-
sinceFrame The starting frame for computing the relative rotation.
- Returns
- A value between 0 and 1 representing the estimated probability that the hand motion between the current frame and the specified frame is intended to be a rotating motion.
- Since
- 1.0
| float com.leapmotion.leap.Hand.scaleFactor | ( | Frame | sinceFrame | ) |
The scale factor derived from this hand's motion between the current frame and the specified frame.
The scale factor is always positive. A value of 1.0 indicates no scaling took place. Values between 0.0 and 1.0 indicate contraction and values greater than 1.0 indicate expansion.
The Leap Motion software derives scaling from the relative inward or outward motion of a hand and its associated fingers and tools (independent of translation and rotation).
If a corresponding Hand object is not found in sinceFrame, or if either this frame or sinceFrame are invalid Frame objects, then this method returns 1.0.
- Parameters
-
sinceFrame The starting frame for computing the relative scaling.
- Returns
- A positive value representing the heuristically determined scaling change ratio of the hand between the current frame and that specified in the sinceFrame parameter.
- Since
- 1.0
| float com.leapmotion.leap.Hand.scaleProbability | ( | Frame | sinceFrame | ) |
The estimated probability that the hand motion between the current frame and the specified frame is intended to be a scaling motion.
If a corresponding Hand object is not found in sinceFrame, or if either this frame or sinceFrame are invalid Frame objects, then this method returns zero.
- Parameters
-
sinceFrame The starting frame for computing the relative scaling.
- Returns
- A value between 0 and 1 representing the estimated probability that the hand motion between the current frame and the specified frame is intended to be a scaling motion.
- Since
- 1.0
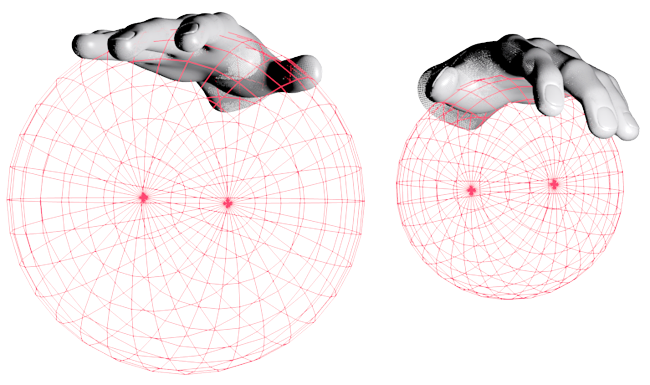
| Vector com.leapmotion.leap.Hand.sphereCenter | ( | ) |
The center of a sphere fit to the curvature of this hand.
This sphere is placed roughly as if the hand were holding a ball.
- Returns
- The Vector representing the center position of the sphere.
- Since
- 1.0
| float com.leapmotion.leap.Hand.sphereRadius | ( | ) |
The radius of a sphere fit to the curvature of this hand.
This sphere is placed roughly as if the hand were holding a ball. Thus the size of the sphere decreases as the fingers are curled into a fist.
- Returns
- The radius of the sphere in millimeters.
- Since
- 1.0
| Vector com.leapmotion.leap.Hand.stabilizedPalmPosition | ( | ) |
The stabilized palm position of this Hand.
Smoothing and stabilization is performed in order to make this value more suitable for interaction with 2D content. The stabilized position lags behind the palm position by a variable amount, depending primarily on the speed of movement.
- Returns
- A modified palm position of this Hand object with some additional smoothing and stabilization applied.
- Since
- 1.0
| float com.leapmotion.leap.Hand.timeVisible | ( | ) |
The duration of time this Hand has been visible to the Leap Motion Controller.
- Returns
- The duration (in seconds) that this Hand has been tracked.
- Since
- 1.0
| Tool com.leapmotion.leap.Hand.tool | ( | int | id | ) |
The Tool object with the specified ID held by this hand.
Use the Hand::tool() function to retrieve a Tool object held by this hand using an ID value obtained from a previous frame. This function always returns a Tool object, but if no tool with the specified ID is present, an invalid Tool object is returned.
Note that ID values persist across frames, but only until tracking of a particular object is lost. If tracking of a tool is lost and subsequently regained, the new Tool object representing that tool may have a different ID than that representing the tool in an earlier frame.
- Parameters
-
id The ID value of a Tool object from a previous frame.
- Returns
- The Tool object with the matching ID if one exists for this hand in this frame; otherwise, an invalid Tool object is returned.
- Since
- 1.0
| ToolList com.leapmotion.leap.Hand.tools | ( | ) |
| String com.leapmotion.leap.Hand.toString | ( | ) |
The change of position of this hand between the current frame and the specified frame.
The returned translation vector provides the magnitude and direction of the movement in millimeters.
If a corresponding Hand object is not found in sinceFrame, or if either this frame or sinceFrame are invalid Frame objects, then this method returns a zero vector.
- Parameters
-
sinceFrame The starting frame for computing the translation.
- Returns
- A Vector representing the heuristically determined change in hand position between the current frame and that specified in the sinceFrame parameter.
- Since
- 1.0
| float com.leapmotion.leap.Hand.translationProbability | ( | Frame | sinceFrame | ) |
The estimated probability that the hand motion between the current frame and the specified frame is intended to be a translating motion.
If a corresponding Hand object is not found in sinceFrame, or if either this frame or sinceFrame are invalid Frame objects, then this method returns zero.
- Parameters
-
sinceFrame The starting frame for computing the translation.
- Returns
- A value between 0 and 1 representing the estimated probability that the hand motion between the current frame and the specified frame is intended to be a translating motion.
- Since
- 1.0